
0591-83370189
网站公告:

作者:小编 时间:2026-04-14 13:27:06
1.一种无导轨轮子行走式焊接机器人,其特征在于:包括焊接机器人本体、移动部;所
述移动部包括第一支撑板、滚轮,所述焊接机器人本体位于第一支撑板上,所述滚轮一端设
有相对应的第六伺服电机,所述第一支撑板上设有车轮转动组件,所述车轮转动组件与第
六伺服电机想连接,所述焊接机器人本体包括底威廉希尔盘、第一轴关节、第二轴关节、第三轴关节、
第四轴关节、第五轴关节、焊枪,所述底盘位于第一支撑板上,所述第一轴关节绕竖直轴线
旋转,所述二轴关节绕竖直轴线前后运动,所述第三轴关节绕其轴线上下运动,所述第四轴
关节绕其轴线旋转,所述第五轴关节绕其轴线前后运动,所述焊枪与第五轴关节相连接。
2.根据权利要求1所述的一种无导轨轮子行走式焊接机器人,其特征在于:所述第一轴
关节位于底盘顶部,所述第二轴关节位于第一轴关节顶部成轴线分布,所述第三轴关节位
于第二轴关节顶部呈横向分布,所述第四轴关节位于第三轴关节顶部轴线分布,所述第五
轴关节位于第四轴关节顶部呈轴线所述的一种无导轨轮子行走式焊接机器人,其特征在于:所述底盘内
设有与第一轴关节相对应的第一伺服电机,所述第一轴关节靠近第一伺服电机一端设有相
4.根据权利要求3所述的一种无导轨轮子行走式焊接机器人,其特征在于:所述第二轴
关节靠近第一轴关节一端设有第二伺服电机,所述第二轴关节上设有与第二伺服电机相对
应的第二减速器,所述第三轴关节靠近第二轴关节一端设有第三伺服电机,所述第三轴关
5.根据权利要求4所述的一种无导轨轮子行走式焊接机器人,其特征在于:所述第四轴
关节靠近第三轴关节一端设有第四伺服电机,所述第四轴关节上设有与第四伺服电机相对
应的第四减速器,所述第五轴关节靠近第四轴关节一端设有第五伺服电机,所述第五轴关
6.根据权利要求5所述的一种无导轨轮子行走式焊接机器人,其特征在于:所述第一伺
服电机、第二伺服电机、第三伺服电机、第四伺服电机、第五伺服电机、第六伺服电机、车轮
途、可重复的编程控制,具有空间6个自由度,属于自动化领域,焊接精确可靠。焊接质量好,
效率高,但市场上的焊接机器人都是有导轨滑台等直线固定运动,设备一旦固定到车间工
动部;所述移动部包括第一支撑板、滚轮,所述焊接机器人本体位于第一支撑板上,所述滚
轮一端设有相对应的第六伺服电机,所述第一支撑板上设有车轮转动组件,所述车轮转动
组件与第六伺服电机想连接,所述焊接机器人本体包括底盘、第一轴关节、第二轴关节、第
三轴关节、第四轴关节、第五轴关节、焊枪,所述底盘位于第一支撑板上,所述第一轴关节绕
竖直轴线旋转,所述二轴关节绕竖直轴线前后运动,所述第三轴关节绕其轴线上下运动,所
述第四轴关节绕其轴线旋转,所述第五轴关节绕其轴线前后运动,所述焊枪与第五轴关节
布,所述第三轴关节位于第二轴关节顶部呈横向分布,所述第四轴关节位于第三轴关节顶
与第二伺服电机相对应的第二减速器,所述第三轴关节靠近第二轴关节一端设有第三伺服
与第四伺服电机相对应的第四减速器,所述第五轴关节靠近第四轴关节一端设有第五伺服
所述第一伺服电机、第二伺服电机、第三伺服电机、第四伺服电机、第五伺服电机、
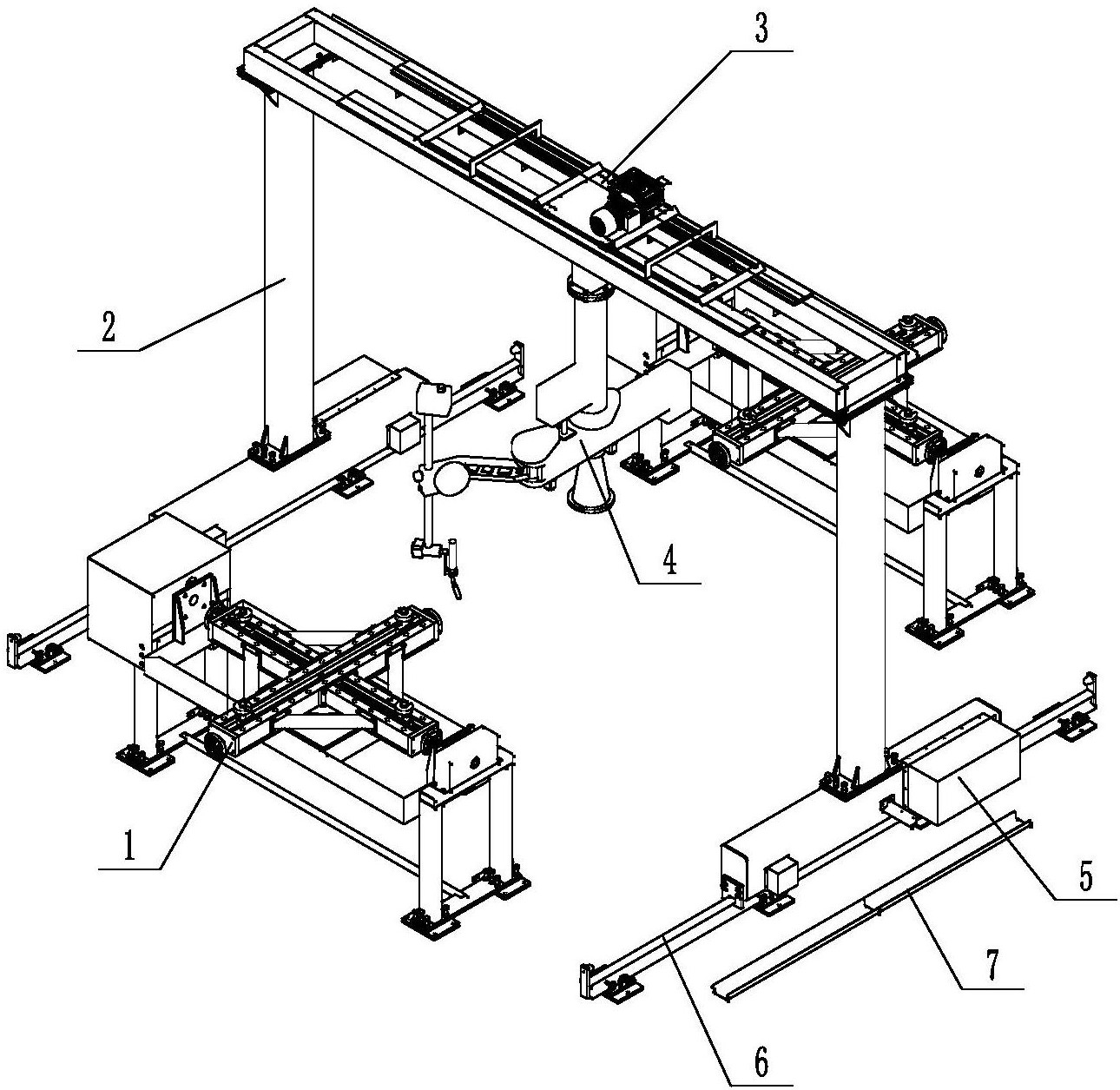
(1、第一支撑板,2、滚轮,3、底盘,4、第一轴关节,5、第二轴关节,6、第三轴关节,7、
如图1所示:本实用新型提供一种无导轨轮子行走式焊接机器人,其包括焊接机器
人本体、移动部;所述移动部包括第一支撑板1、滚轮2,所述焊接机器人本体位于第一支撑
板1 上,所述滚轮2一端设有相对应的第六伺服电机,所述第一支撑板1上设有车轮转动组
件,所述车轮转动组件与第六伺服电机想连接,所述焊接机器人本体包括底盘3、第一轴关
节4、第二轴关节5、第三轴关节6、第四轴关节7、第五轴关节8、焊枪9,所述底盘3位于第一支
本实用新型中第一轴关节4位于底盘3顶部,所述第二轴关节5位于第一轴关节4顶
本实用新型中底座3内设有与第一轴关节4相对应的第一伺服电机,所述第一轴关
本实用新型中第二轴关节5靠近第一轴关节4一端设有第二伺服电机,所述第二轴
关节 5上设有与第二伺服电机相对应的第二减速器,所述第三轴关节6靠近第二轴关节5一
端设有第三伺服电机,所述第三轴威廉希尔关节6上设有与第三伺服电机相对应的第三减速器。
本实用新型中第四轴关节7靠近第三轴关节6一端设有第四伺服电机,所述第四轴
关节 7上设有与第四伺服电机相对应的第四减速器,所述第五轴关节8靠近第四轴关节7一
端设有第五伺服电机,所述第五轴关节8上设有与第五伺服电机相对应的第五减速器。
本实用新型中第一伺服电机、第二伺服电机、第三伺服电机、第四伺服电机、第五
工作原理:使用时将焊接机器人本体放置在第一支撑板1上,所述PLC通过控制第
六伺服电机带动滚轮2转动将焊接机器人本体进行移动,所述PLC控制车轮转动组件控制滚
轮2 的转动方向,根据实际生产需求由PLC通过第一伺服电机控制第一轴关节4圆周转动、
第二伺服电机控制第二轴关节5前后运动、第三伺服电机控制第三轴关节6上下运动,第四
伺服电机控制第四轴关节7旋转运动、第五伺服电机控制第五轴关节8前后运动,最后通过
焊枪 9对工件进行焊接,所述减速器可对伺服电进行减速便于PLC控制伺服电机的转速。
的也只是本实用新型的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的
普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与
